“Learning digital signal processing is not something you accomplish; it’s a journey you take.”
— Richard G. Lyons
Our last post (article III) covered radio frequency spectrum bands and their applications. However, the primary reason for starting this series is to develop both theoretical and practical knowledge of DSP. Over time, readers can expect an Applied DSP series to be published concurrently. In this article, we will focus on topics covered in Chapter One of Lyons’s Understanding Digital Signal Processing (UDSP) (specifically Discrete Sequences and Systems). The intuition behind the distinction between discrete and continuous waveforms should become unquestionably clear after this post. Furthermore, we will demonstrate the benefits of representing physical measurements in either form. The notation associated with each will be discussed, and we will use Python’s Matplotlib library to graphically illustrate their key differences. In addition, we will carefully evaluate the contrast between signal amplitude, magnitude, and power. Finally, basic signal processing operations will be introduced, and we will use Draw.io to construct DSP block diagrams.
Discrete Sequences and Continuous Waveforms
From our intuition, one might think that the characterization of a discrete sequence from a continuous waveform is fully distinct. Mathematically, they are quite different; however, in engineering, we must often accept that physical hardware has limits, and thus, it is sometimes appropriate to treat certain sequences as continuous for analysis purposes. For example, satellite monitoring of space weather requires many sensors that periodically sample measurements, relaying this information to nearby ground stations. Disregarding the fundamental principles of modern physics that may dictate the granularity of nature, conceptually, these sensors are mapping continuous physical phenomena into discrete sequences of measurements taken at discrete time intervals (
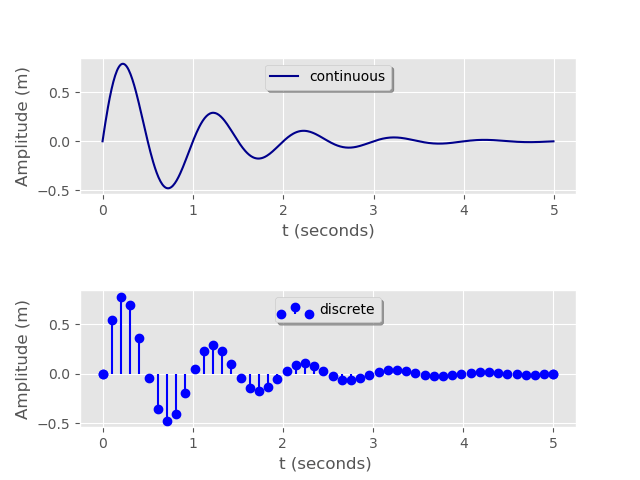
For now we will concern ourselves only with signals whose time domain is quantized; we will focus on signals with discretized amplitudes in later articles. The difference between continuous waveforms and discrete sequences is depicted in the graphic below:
Python Code (click here)
import matplotlib
import matplotlib.pyplot as plt
import numpy as np
num_samples = 50
t_1 = np.arange(0.0, 5.0, 0.01)
t_2 = np.linspace(0.0, 5.0, num_samples)
def damped_sin(t):
return np.exp(-t)*np.sin(2*np.pi*t)
matplotlib.style.use('ggplot')
plt.figure(1)
plt.subplot(211)
plt.plot(t_1, damped_sin(t_1), label = 'continuous', color = 'darkblue')
plt.xlabel('t (seconds)')
plt.ylabel('Amplitude (m)')
legend = plt.legend(loc='upper center', shadow=True)
plt.subplot(212)
plt.stem(t_2, damped_sin(t_2), label = 'discrete', markerfmt='bo', linefmt = 'bo', basefmt = 'bo')
plt.xlabel('t (seconds) ')
plt.ylabel('Amplitude (m)')
legend = plt.legend(loc='upper center', shadow=True)
plt.subplots_adjust(hspace=0.7)
# plt.savefig("damped_sin.png")
plt.show()Lyons used the sinusoidal function as his example to illustrate the distinction, but the upper graph depicts a common scenario known as the damped sinusoidal wave. The continuous and discrete equations are presented, respectively:
Continuous Waveform

Discrete Sequence
![\displaystyle x[n] = e^{-t_{s}n}\sin(2 \pi f_{0} n t_{s})](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+x%5Bn%5D+%3D+e%5E%7B-t_%7Bs%7Dn%7D%5Csin%282+%5Cpi+f_%7B0%7D+n+t_%7Bs%7D%29&bg=ffffff&fg=242424&s=0&c=20201002)
where 

![x[n]](https://s0.wp.com/latex.php?latex=x%5Bn%5D&bg=ffffff&fg=242424&s=0&c=20201002)


and the sample frequency 


… and we understand, from article III, the inverse relationship between the period of 


Remarks (click here)
======================================
The term “oscillation” in the formula for 
======================================
Signal Amplitude, Magnitude, and Power
It’s interesting to see why Mr. Lyons readily made a distinction between these concepts. Spending so many years as the lead hardware engineer at the National Security Agency and Northrop Grumman Corp, he likely encountered many people who mistakenly used them interchangeably. This section may be summarized with the following chart:
| Name | Notation | Description |
|---|---|---|
| Signal Amplitude | | A raw, unsigned, instantaneous sample value. |
| Magnitude | ![|x[n]|](https://s0.wp.com/latex.php?latex=%7Cx%5Bn%5D%7C&bg=ffffff&fg=242424&s=0&c=20201002) | The absolute value of the signal amplitude (always non-negative). |
| Power | ![|x[n]|^{2}](https://s0.wp.com/latex.php?latex=%7Cx%5Bn%5D%7C%5E%7B2%7D&bg=ffffff&fg=242424&s=0&c=20201002) | The squared magnitude; represents the power of the sample. |
DSP Block Diagrams
Now we will talk a little bit about some of the common graphical operational symbols used for signal processing, and how they might be used to demonstrate complex systems. One can more broadly see these operations as a transformation of some input digital signal to a digital output, which will be called a “system”. The Draw.io software would be really helpful to us in the future, for constructing these systems. Our most fundamental, addition, subtraction, summation, multiplication, and Unit delay are demonstrated below:
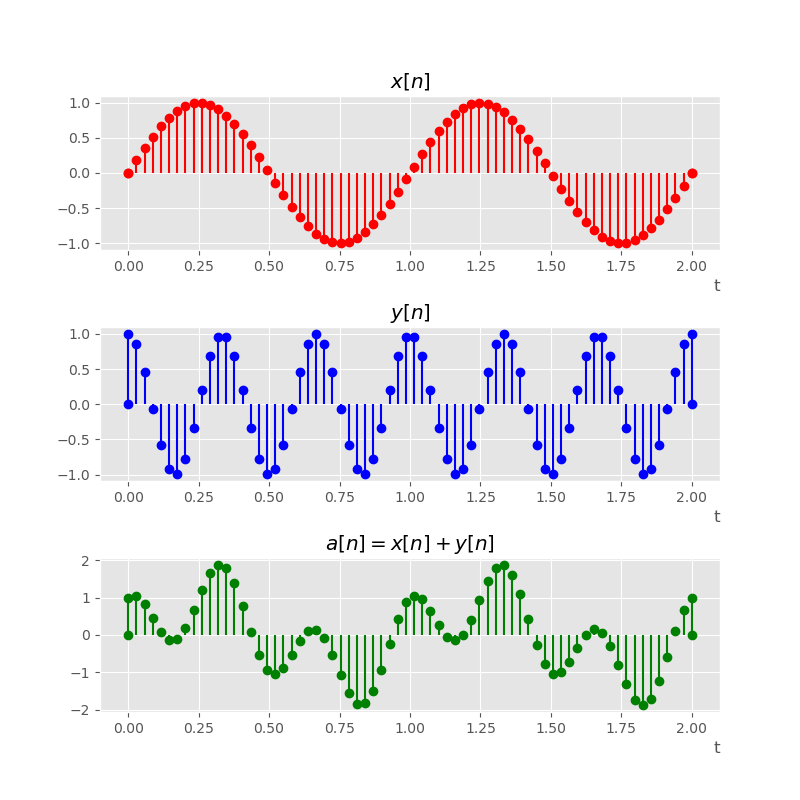
Addition
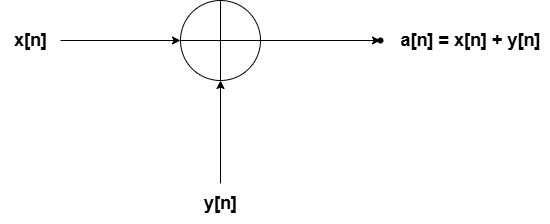
The addition operator is represented by a circle and a cross. As we can see from the graphic above, it takes the inputs ![y[n]](https://s0.wp.com/latex.php?latex=y%5Bn%5D&bg=ffffff&fg=242424&s=0&c=20201002)
![a[n] = x[n] + y[n]](https://s0.wp.com/latex.php?latex=a%5Bn%5D+%3D+x%5Bn%5D+%2B+y%5Bn%5D&bg=ffffff&fg=242424&s=0&c=20201002)
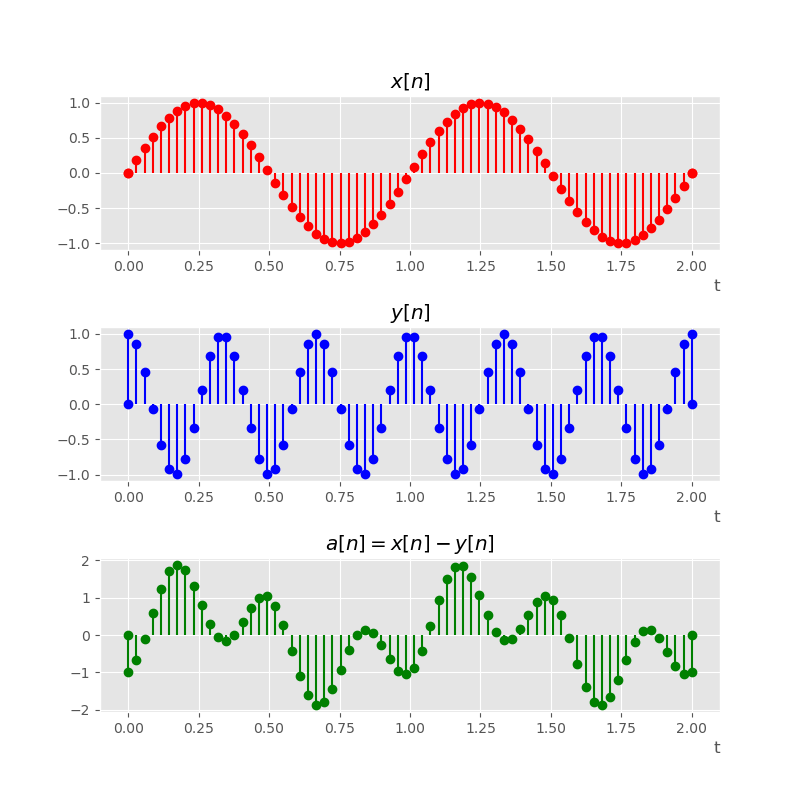
Subtraction
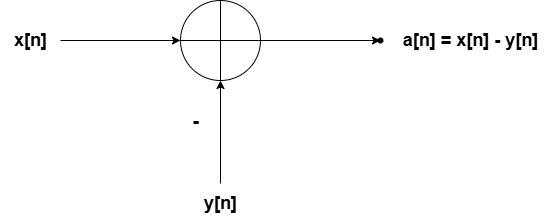
Subtraction can be viewed as addition where the input signal ![-y[n]](https://s0.wp.com/latex.php?latex=-y%5Bn%5D&bg=ffffff&fg=242424&s=0&c=20201002)
![a[n]](https://s0.wp.com/latex.php?latex=a%5Bn%5D&bg=ffffff&fg=242424&s=0&c=20201002)
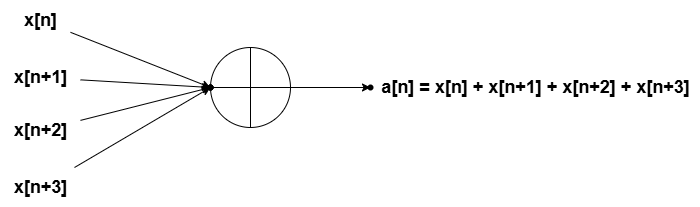
Summation
Another common operation useful in DSP is the summation operator. This operator iteratively takes a specified number of consecutive values as inputs and produces their sum as the output. The number of values taken as input is called the window of the summation. For example, the window in the diagram below equals 3.
Let’s take a look at the table below:
| n | x[n] | a[n] (window = 2) | a[n] (window = 3) |
|---|---|---|---|
| 0 | 0 | 1.9482 | 5.6335 |
| 1 | 1.9482 | 5.6335 | 10.6565 |
| 2 | 3.6853 | 8.7083 | 14.5247 |
| 3 | 5.023 | 10.8394 | 16.8189 |
| 4 | 5.8164 | 11.7959 | 17.2905 |
| 5 | 5.9795 | 11.4741 | 15.8884 |
| 6 | 5.4946 | 9.9089 | 12.7646 |
| 7 | 4.4143 | 7.27 | 8.2576 |
| 8 | 2.8557 | 3.8433 | 2.8557 |
| 9 | 0.9876 | 0 | -2.8557 |
| 10 | -0.9876 | -3.8433 | -8.2576 |
Here we see that the input is ![x[n] = 6 \sin{(2 \pi n)}](https://s0.wp.com/latex.php?latex=x%5Bn%5D+%3D+6+%5Csin%7B%282+%5Cpi+n%29%7D&bg=ffffff&fg=242424&s=0&c=20201002)
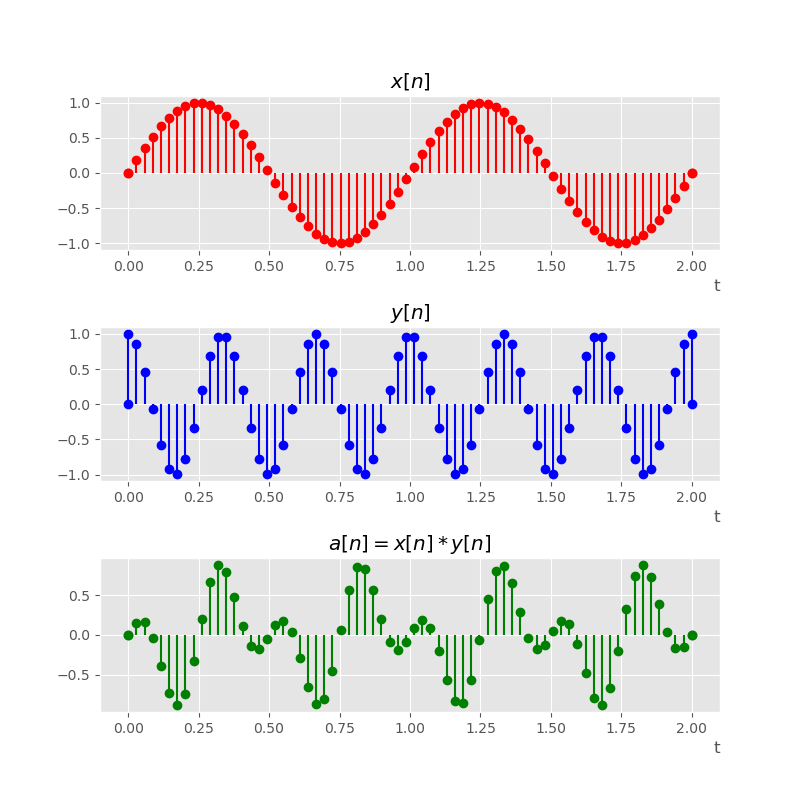
Multiplication
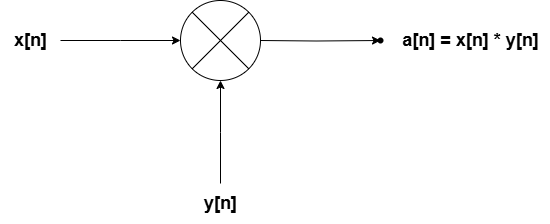
Multiplying waveforms is pretty straightforward. Similar to addition and subtraction, it requires two input sequences, but it returns the product of those sequences.
Unit Delay
Finally, we have the unit delay, the fundamental building block that shifts an input sequence by one sample. It implements the mapping
![\displaystyle x[n] \mapsto x[n-1]](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+x%5Bn%5D+%5Cmapsto+x%5Bn-1%5D&bg=ffffff&fg=242424&s=0&c=20201002)
for all

The table that follows summarizes how each input value is shifted. At 
![x[-1]](https://s0.wp.com/latex.php?latex=x%5B-1%5D&bg=ffffff&fg=242424&s=0&c=20201002)
| n | x[n] | a[n] = x[n-1] |
|---|---|---|
| 0 | 0 | 0 |
| 1 | 1.9482 | 0 |
| 2 | 3.6853 | 1.9482 |
| 3 | 5.023 | 3.6853 |
| 4 | 5.8164 | 5.023 |
| 5 | 5.9795 | 5.8164 |
| 6 | 5.4946 | 5.9795 |
| 7 | 4.4143 | 5.4946 |
| 8 | 2.8557 | 4.4143 |
| 9 | 0.9876 | 2.8557 |
| 10 | -0.9876 | 0.9876 |
Having distinguished discrete from continuous waveforms, reviewed key signal metrics, and explored foundational block diagrams, we’re now ready to dive into Part II (an in-depth study of linear and nonlinear systems and their practical applications).
